4. Dynamic Programming
데이터사이언스 대학원 강화학습 수업을 듣고 정리한 내용입니다.
Policy Evaluation & Policy Improvement¶
The term dynamic programming (DP) refers to a collection of algorithms that can be used to compute optimal policies given a perfect model of the environment as a Markov decision process (MDP)
강화학습에서 우리가 완전한 dynamic을 알고 있을 때, DP로 다음 문제를 해결하기 위해 사용한다.
- Policy Evaluation(prediction problem): 주어진 policy에서 value fuction을 반복적으로 연산하는 과정(MDP, \(\pi \rightarrow v_{\pi}\))
- Policy Improvement(control): value function이 주어졌을 때, 향상된 policy를 계산하는 것(MDP, \(v_{\pi} \rightarrow \pi'\))
Policy Evaluation¶
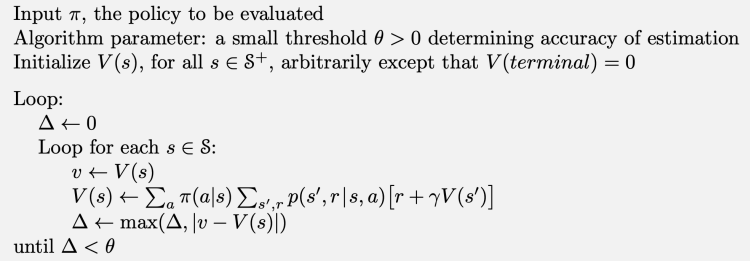
Policy Evaluation은 policy \(\pi\)가 주어졌을 때, Value function \(v_\pi\)를 계산한다. Policy Evaluation Update Rule은 다음과 같으며, 여기서 \(k\)는 \(k\) 번째 policy다.
Iterative Policy Evaluation
Example: 4 x 4 Grid-World¶

이번 Grid-World 예시는 다음과 같다.
Note
- Non-terminal states \(S = \lbrace 1, 2, \cdots, 14 \rbrace\), 회색 영역은 terminal state.
- State Transition(\(s \rightarrow s'\))은 \(-1\)의 보상을 얻고, grid밖을 벗어나면 이전 state에 있는 것으로 간주한다. 즉, 많이 움직일 수록 안좋다.
- Actions \(\mathcal{A} = \lbrace \uparrow, \downarrow, \rightarrow, \leftarrow \rbrace\)
- Uniformly random policy \(\pi(a \vert s) = 0.25\) for all \(a \in \mathcal{A}\) and for all non-terminal states \(s \in \mathcal{S}\)
- Deterministic state transition & reward model \(p(s', r \vert s, a)\)
- 예시1: \(p(s'=6, r=-1 \vert s=5, a=\rightarrow)=1\), grid 5에서 우측 행동(\(\rightarrow\)) 선택 시 grid 6으로 가고 보상도 \(-1\)을 얻을 확률은 1.
- 예시2: \(p(s'=7, r=-1 \vert s=7, a=\rightarrow)=1\), grid 7에서 우측 행동(\(\rightarrow\)) 선택 시 grid 7으로 가고 보상도 \(-1\)을 얻을 확률은 1.
- 예시3: \(p(s'=10, r=r' \vert s=5, a=\rightarrow)=0 \ \forall r' \in \mathcal{R}\), grid 5에서 우측 행동(\(\rightarrow\)) 선택 시 grid 10으로 갈 수 있는 확률은 0.
- \(\gamma=1.0\)를 가정한다.
그렇다면 이러한 MDP 환경에서 최대의 보상은 무엇일까? 당연히 제일 적은 스텝으로 terminal state에 도달하는 것이다.
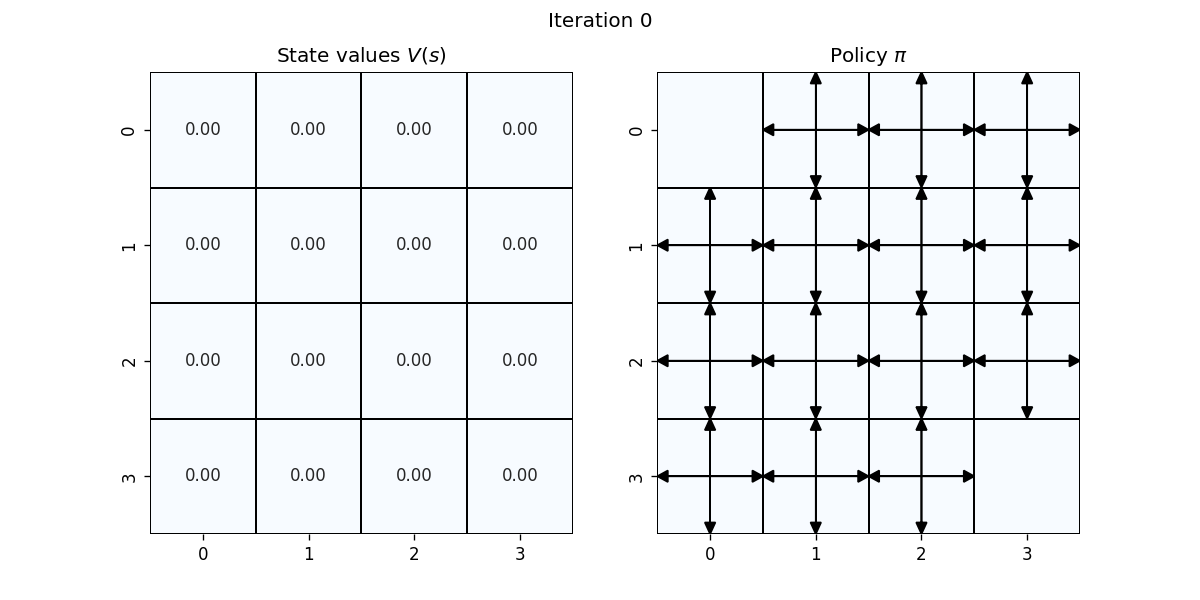
따라서 Initial State \(V(s)=0\)를 만들고 계속해서 policy evaluation을 진행해보자. 메모리에 상관없이 각 좌표에서 replace하지 않고 두 개의 matrix로 업데이트 한다고 가정한다.
과정 풀어쓰기
| (i, j) | 0 | 1 | 2 | 3 |
|---|---|---|---|---|
| 0 | 0.0 | 0.0 | 0.0 | 0.0 |
| 1 | 0.0 | 0.0 | 0.0 | 0.0 |
| 2 | 0.0 | 0.0 | 0.0 | 0.0 |
| 3 | 0.0 | 0.0 | 0.0 | 0.0 |
초기 상태 가치는 모두 0.0이다.
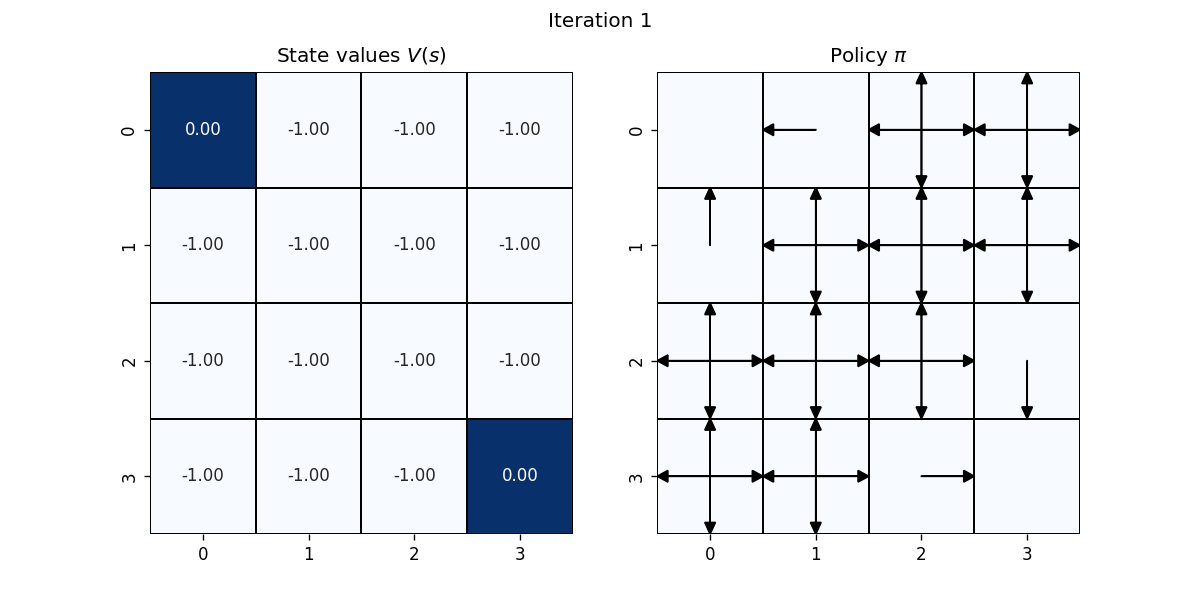
| (i, j) | 0 | 1 | 2 | 3 |
|---|---|---|---|---|
| 0 | 0.0 | -1.0 | -1.0 | -1.0 |
| 1 | -1.0 | -1.0 | -1.0 | -1.0 |
| 2 | -1.0 | -1.0 | -1.0 | -1.0 |
| 3 | -1.0 | -1.0 | -1.0 | 0.0 |
각 state \(s \in \mathcal{S}\) 에서 Bellman equation을 사용하여 업데이트 하면 위의 표와 같다.
예를 들어, 좌표 (0, 2) \(s=2\)에서 \(s' \in \lbrace 1, 2, 3, 6 \rbrace\)의 transition을 제외하고 모두 확률이 0이 되기 때문에 다음과 같이 \(v_{k+1}(s)\)를 계산할 수 있다.
다른 예시로 terminal state 중 하나인 좌표 (0, 0)은 모든 transition에 대하여 확률이 0이기 때문에 계속 \(0.0\) 이다.
| (i, j) | 0 | 1 | 2 | 3 |
|---|---|---|---|---|
| 0 | 0.0 | -1.75 | -2.0 | -2.0 |
| 1 | -1.75 | -2.0 | -2.0 | -2.0 |
| 2 | -2.0 | -2.0 | -2.0 | -1.75 |
| 3 | -2.0 | -2.0 | -1.75 | 0.0 |
각 state \(s \in \mathcal{S}\) 에서 Bellman equation을 사용하여 업데이트 하면 위의 표와 같다.
예를 들어, 좌표 (1, 2) \(s=6\)에서 \(s' \in \lbrace 5, 2, 7, 10 \rbrace\)를 제외하고 모두 확률이 0이 되기 때문에 다음과 같이 \(v_{k+1}(s)\)를 계산할 수 있다.
다른 예시로, 좌표 (0, 1) \(s=1\)에서 \(s' \in \lbrace \text{terminate}, 1, 2, 5 \rbrace\)를 제외하고 모두 확률이 0이 되기 때문에 다음과 같이 \(v_{k+1}(s)\)를 계산할 수 있다.
Policy Improvement¶
Policy Improvement는 value function \(v_\pi\)가 주어졌을 때, 향상된 policy \(\pi'\)을 구하는 것이다.
Policy Improvement Theorem
Let \(\pi\) and \(\pi'\) be any pair of deterministic policies such that, for all \(s \in \mathcal{S}\), \(q_{\pi}\big(s, \pi'(s) \big) \geq v_{\pi}(s)\).
Then the policy \(\pi'\) must be as good as, or better than \(\pi\).
Theorm을 풀어 쓰자면, 새로운 policy \(\pi'\) 에서의 action-value가 state-value 보다 같거나 높다면, \(\pi'\)는 \(\pi\)보다 같거나 좋은 policy다. 따라서 improved policy \(\pi'\)를 얻기 위해서는 action-value function을 최대화 하는 policy를 선택하면 된다.
Grid-World Improved Policy
최종적으로 improved policy는 action-value가 최대가 되는 action을 선택하는 policy가 된다. 예: \(s=1\)에서 improved policy는 \(\leftarrow\)
좌: \(v_k\), 우: greedy policy with \(v_k\)
좌: \(v_k\), 우: greedy policy with \(v_k\)
좌: \(v_k\), 우: greedy policy with \(v_k\)

좌: \(v_k\), 우: greedy policy with \(v_k\)

좌: \(v_k\), 우: greedy policy with \(v_k\)

좌: \(v_k\), 우: greedy policy with \(v_k\)

Policy Iteration¶
우리의 최종 목적은 결국 최적의 policy를 구하는 것이다. Policy Iteration은 policy evaluation(\(E\))과 improvement(\(I\))를 반복하는 과정이다.
Policy Iteration

-
Policy Evaluation
- \(\Delta\): 이전의 value와 현재 value의 차이
- \(v\): 이전 value 저장
- 모든 state \(s\) 에서 벨만 업데이트를 통해 현재 \(s\)의 value \(V(s)\)를 구한다.
- \(v\)와 \(V(s)\)의 차이 절댓값과 \(\Delta\)중 큰 것을 남긴다.
- \(\Delta\)가 아주 작은 임의의 수 \(\theta\)보다 작을 때 까지 Policy Evaluation을 한다.
-
Policy Improvement
- 모든 state \(s\) 에서 value가 가장 큰 action을 선택하여 policy \(\pi(s)\) 로 지정
old-action이 현재 policy \(\pi(s)\)와 같이 않으면 아직policy-stable상태가 아닌 것이다.policy-stable상태면 멈추고 최적의 value \(v_*\)와 최적의 policy \(\pi_*\) 반환
Value Iteration¶
Policy Iteration의 단점은 매 스텝마다 policy evaluation이 포함된다는 것이다. 한번에 가능하게 만들 수 없을까?
Value Iteration

Generalized Policy Iteration¶

the general idea of letting policy-evaluation and policyimprovement processes interact, independent of the granularity and other details of the two processes
Policy evaluation과 policy imporvement의 반복이라 볼 수 있다. 그리고 매 스텝마다 최적만 찾을 필요는 없다. approximate policy and approximate value function를 통해서 적당히 좋은 최적값을 찾으면 최종적으로 최적의 값을 찾게 된다.